Hello there, I’m Divyansh
I’m a robotics engineer who loves hands-on work with hardware, but what really excites me is working on middleware layer - interfacing sensors and actuators, programming controllers, reviewing literature and implementing novel ideas to improve hardware performance. It’s where I get to combine my intuition for mechanical systems with underlying maths and physics. It’s the kind of work that challenges and excites me.
I’ve built a solid academic foundation with a Master’s in Robotics (GPA: 3.98, Dec 2024) from Northeastern University, Boston, and a Bachelor’s in Mechanical Engineering (GPA: 3.3, May 2020) from IIT Roorkee, India. Along the way, I’ve gained about 2.5 years of work-experience through internships and a full-time role. On top of that, I’m a self-learner, who has spent over 5,000 hours working on 10+ long research projects to learn and build things from ground up.
Right now, I’m looking for a full-time role in robotics, preferrably in mechatronics, controls or HW-SW integration, where I can bring my technical skills and strong sense of ownership to your team. I’m driven by the desire to make a real impact, and I’d love to work with a workplace that shares that same vision.
Outside Academia
I like to stay active, try new things that scares me and explore. I recently learned sailing (at Charles River, Boston), like every other engineer I do bouldering and sometimes reading mostly self-help - “Start with Why by Simon Sinek” and “The Alchemist by Paulo Coelho” are some of my favorites. Also, in summer 2024, I did my first solo-trip traveling Thailand, Italy, Switzerland (did Via-Ferrata) and Amsterdam, currently planning for more!
I’d love to chat about anything in common whether love for robotics or outside academia, feel free to reach out via LinkedIn or email!
Work Highlights:
Poster: North East Robotics Conference (NERC-2023) poster presentation at Yale University
Northeastern University Global News coverage of my lab work highlighting my Ankle Exoskeleton project
MS Thesis Non-linear series elastic cable drive actuator - Design and Controls (Patent Pending: US Patent 18/911616)
Glimpse of Me n Robots:

Ankle Exo with SEA

Hugo - Medtronic
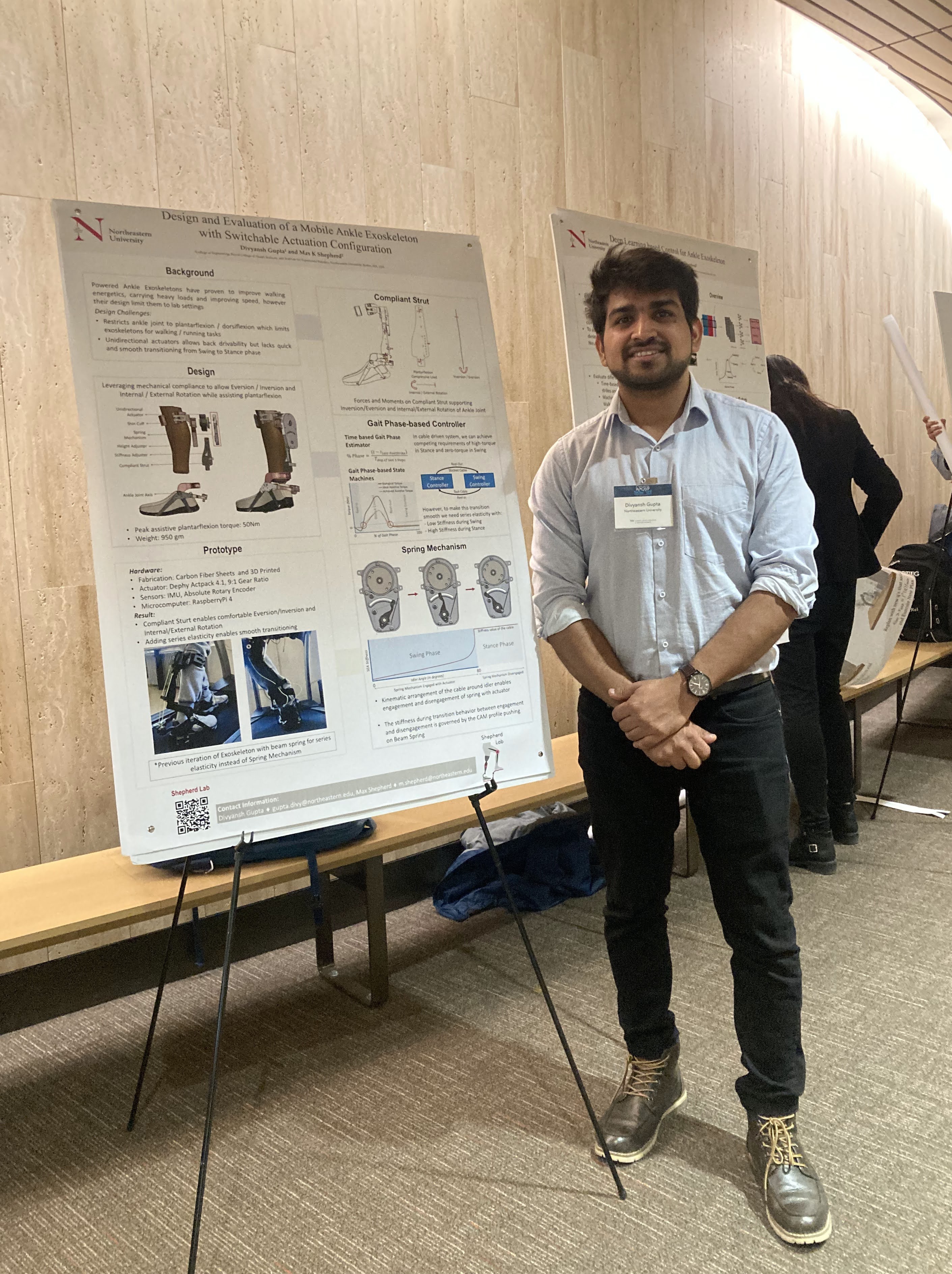
NERC Conference at Yale University

OttonomyIO - Autonomous Delivery Robot (Snow Testing)
Assembling PrusaMK4
Rehabilitation Experiment
Butler robot and Quadruped (Inter-IIT Tech competition)
Autonomous toilet cleaning robot (my first robot, 2017)